ROS Name and Roslaunch
Name Remapping
ROS의 모든 구성 요소(노드, 토픽, 서비스, 파라미터) 등은 고유의 네임(Name)을 가진다. 예를 들어 각 노드는 고유의 네임을 가지기 때문에 같은 네임의 노드 두 개를 동시에 실행하지 못한다. 터틀심 패키지로 시험해보자.
$ roscore
# 새 탭
$ rosrun turtlesim turtlesim_node
# 새 탭
$ rosrun turtlesim turtle_teleop_key
# 거북이 조작 ...
# 새 탭
$ rosrun turtlesim turtlesim_node
마지막 명령어를 넣는 순간 기존 turtlesim_node는 종료되고 새로운 turtlesim_node가 실행되는 것을 볼 수 있다. 노드의 네임은 고유해야 하기 때문에 같은 네임으로 새로운 노드를 실행하면 기존 노드가 종료된다.
앞으로 roscore는 항상 켜있다고 생각하고 생략한다.
1. Node Name Remapping
같은 노드를 여러 개 실행하려면 다른 네임으로 실행해야 한다. 노드의 기본 네임은 파이썬 코드에서 rospy.init_node("<node_name>")에서 결정하는데 다른 네임의 노드를 실행하기 위해 코드를 수정할 필요는 없다. 커맨드라인에서 네임을 재지정(remapping)하면 된다. rosrun 명령어 뒤에 <old_name>:=<new_name>형식으로 덧붙이면 노드나 토픽 네임을 재지정할 수 있다.
먼저 위 명령어에서 turtlesim_node가 어떤 이름으로 실행됐는지 확인한다.
$ rosnode list
/rosout
/teleop_turtle
/turtlesim
Note: rosrun 사용 방법은 rosrun <패키지 이름> <노드 실행 파일 이름> 이다. “노드 실행 파일 이름”과 “노드 네임”은 다르다는 것을 유의하자.
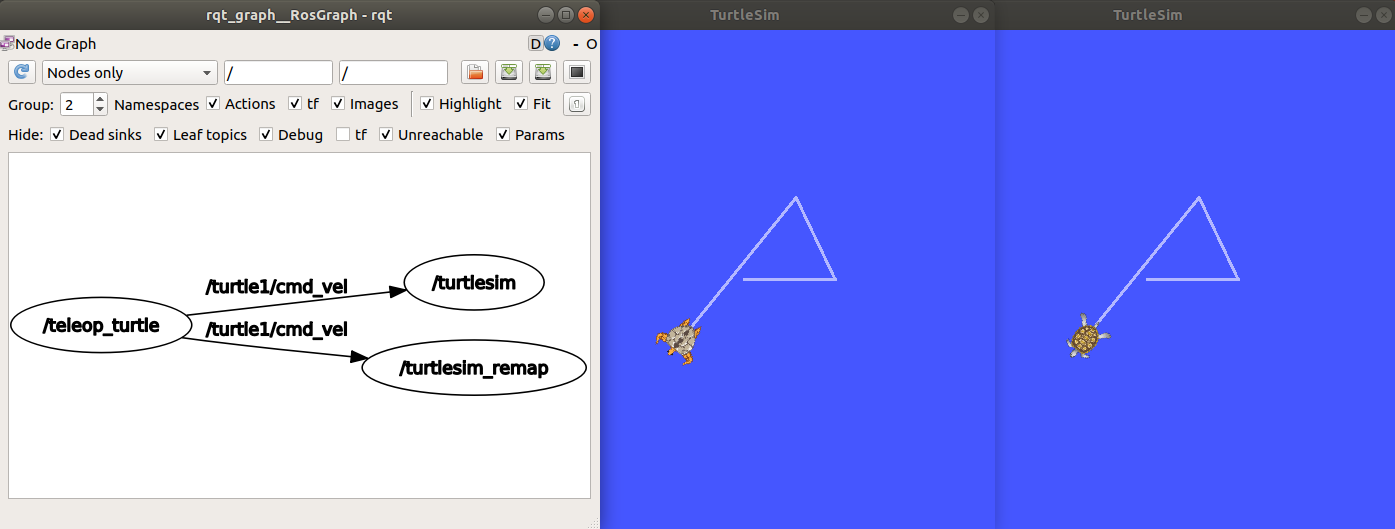
현재 네임은 /turtlesim이라는 것을 알 수 있다. 이 네임을 turtlesim_remap으로 수정하여 실행한다. 노드와 토픽 정보를 보기 위해 rqt_graph도 실행한다.
$ rosrun turtlesim turtlesim_node /turtlesim:=turtlesim_remap
# 새 탭
$ rqt_graph
# 새 탭
$ rosnode list
/rosout
/rqt_gui_py_node_11320
/teleop_turtle
/turtlesim
/turtlesim_remap
기존 /turtlesim 노드가 사라지지 않고 새로운 turtlesim_node가 실행됨을 볼 수 있다. /teleop_turtle에서 turtle1/cmd_vel 토픽을 발행하면 같은 토픽을 구독하는 /turtlesim과 turtlesim_remap에서 동시에 정보를 받아 똑같이 움직이게 된다.
노드의 네임을 바꾸기 위해 꼭 기본 네임을 알아야 하는 것은 아니다. __name 은 노드의 기본 네임을 대체할 수 있는 특수 키다. 아래 명령어로 /turtlesim_name_key를 새로 실행할 수 있다.
$ rosrun turtlesim turtlesim_node __name:=turtlesim_name_key
$ rosnode list
/rosout
/rqt_gui_py_node_11320
/teleop_turtle
/turtlesim
/turtlesim_name_key
/turtlesim_remap
2. Topic Name Remapping
토픽도 고유의 네임(Name)이 있고 토픽의 네임도 재지정이 가능하다. 재지정 방법도 노드 네임과 동일하다. 실행 중인 노드를 모두 종료 후 다시 turtlesim_node와 turtle_teleop_key를 실행하고 토픽 리스트를 확인해보자.
$ rosrun turtlesim turtlesim_node
# 새 탭
$ rosrun turtlesim turtle_teleop_key
# 새 탭
$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
저 토픽들 중에 거북이의 움직임을 제어하는 /turtle1/cmd_vel 토픽의 네임을 turtle_vel로 바꿔서 실행해보자. 기존 노드를 살려두기 위해 turtlesim_node와 turtle_teleop_key의 네임도 재지정한다.
$ rosrun turtlesim turtlesim_node /turtlesim:=turtle_node /turtle1/cmd_vel:=turtle_vel
# 새 탭
$ rosrun turtlesim turtle_teleop_key /teleop_turtle:=teleop_node /turtle1/cmd_vel:=turtle_vel
# 새 탭
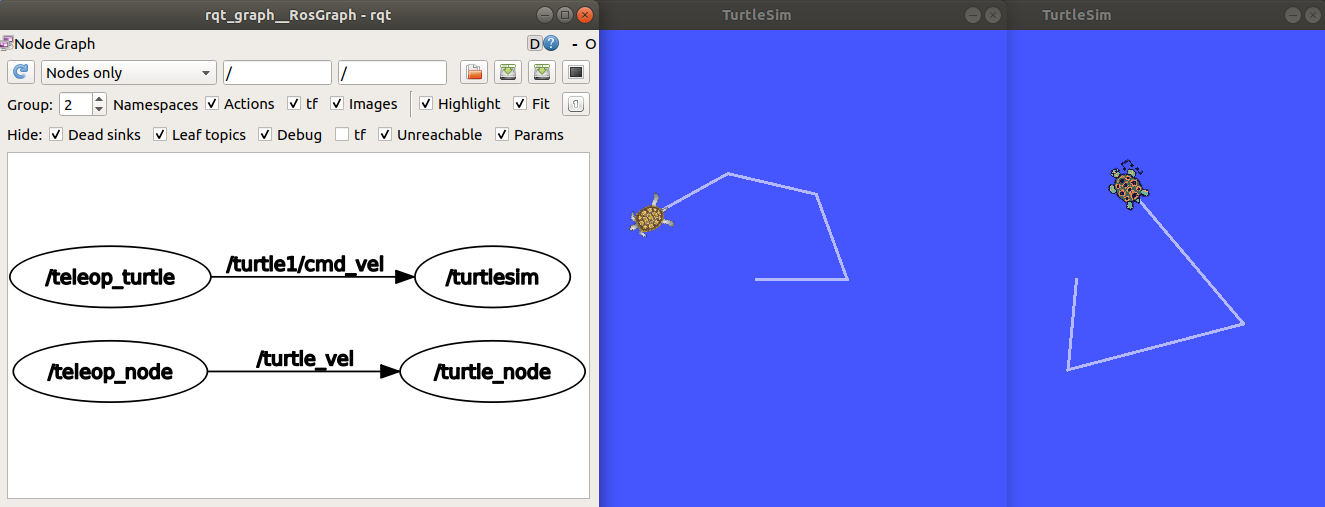
$ rqt_graph
아래 그래프를 보면 이제 노드가 두 개씩 짝지어진 것을 볼 수 있다. 위쪽은 기본 rosrun을 실행한 결과다. 아래쪽은 노드와 토픽의 네임을 재지정한 결과다.
3. Namespace
2의 예시처럼 노드 네임과 노드에서 발행하거나 구독하는 토픽 네임을 동시에 바꾸고 싶을 때는 노드와 토픽의 네임을 각각 재지정하는 것 보다는 네임스페이스(Namespace)를 활용하는 것이 효과적이다. 네임스페이스는 노드나 토픽의 네임 앞에 동일한 접두사(prefix)를 덧붙여 네임이 겹치지 않도록한다. 예를 들어 foo라는 네임스페이스에서 bar라는 노드를 실행하면 그 노드의 네임은 /foo/bar가 된다. 서로 다른 네임스페이스의 노드나 토픽은 네임이 겹칠 위험이 없고 다른 네임스페이스와의 통신도 제한된다.
2의 예시처럼 연결된 turtlesim_node와 turtle_teleop_key 쌍을 두 개 실행하는데 서로 다른 네임스페이스에서 실행해보자. 먼저 box_turtle 네임스페이스에서 실행한다.
$ rosrun turtlesim turtlesim_node __ns:=box_turtle
# 새 탭
$ rosrun turtlesim turtle_teleop_key __ns:=box_turtle
musk_turtle 네임스페이스에서도 실행하고 그래프를 확인한다.
# 새 탭
$ rosrun turtlesim turtlesim_node __ns:=musk_turtle
# 새 탭
$ rosrun turtlesim turtle_teleop_key __ns:=musk_turtle
# 새 탭
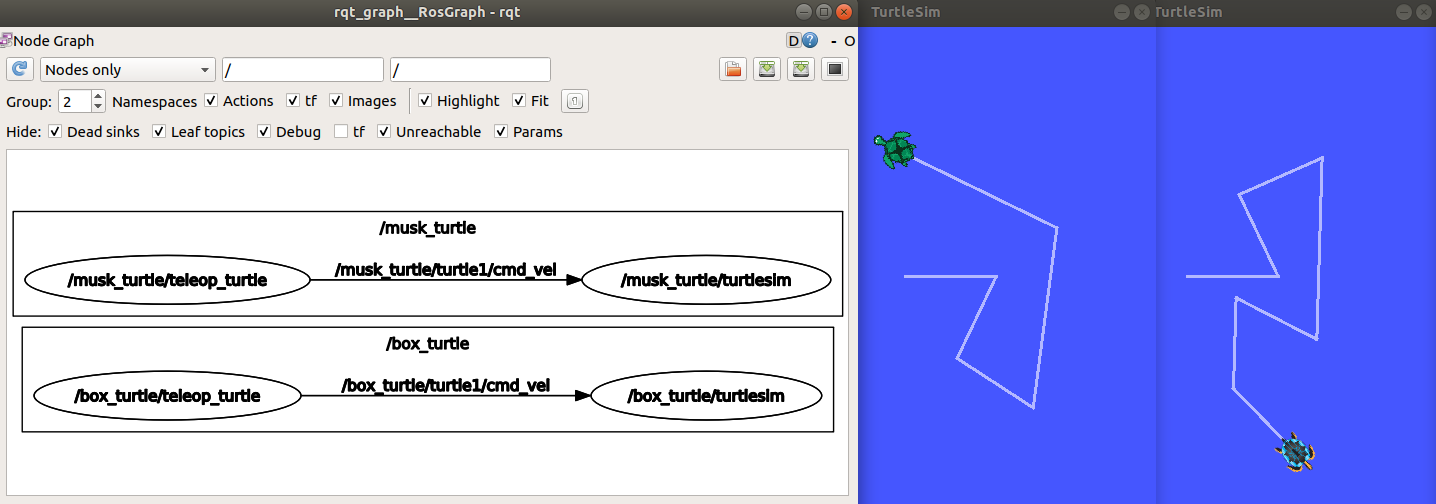
$ rqt_graph
그래프를 보면 노드와 토픽이 네임스페이스 안에 갖혀있고 그 내부의 노드와 토픽에는 네임스페이스 이름이 덧붙여져 있는 것을 볼 수 있다. 이렇게 하면 기존 노드나 토픽 네임을 신경쓰지 않고 쉽게 같은 시스템을 병렬로 실행할 수 있다.
4. Details of Remapping
앞선 예시들에서 네임 앞에 /가 붙어있는데 무슨 의미일까? 네임의 구조는 리눅스 디렉토리 구조를 생각하면 쉽게 이해할 수 있다. 리눅스에서 / 최상위 루트(root) 경로인 것처럼 네임에서는 /가 전역(global) 네임스페이스다. 따라서 모든 네임들의 절대 경로는 /로 시작하게 된다. rosnode list나 rostopic list 실행시 모든 네임 앞에 /가 붙는 이유다.
네임스페이스를 만들게 되면 / 아래에 네임스페이스의 네임이 추가로 붙는다. 재지정을 할때 원래 네임은 절대 경로로 써줘야 한다. 그냥 turtlesim:=turtle_node은 효과가 없고 /turtlesim:=turtle_node처럼 앞에 /부터 시작해야 한다. 새로운 네임에는 /가 붙지 않으면 자동으로 전역 네임스페이스(/)에서 네임 경로를 시작한다.
참고자료: http://wiki.ros.org/Remapping%20Arguments
의문사항
- C++로 만든 노드는 네임 재지정이 잘 되는데 파이썬 노드는 일부 안되는 점이 있다.
- 파이썬 노드에서
<src_name>:=<dst_name>으로 노드 네임 재지정이 되지 않고__name:=<dst_name>은 작동한다. - 파이썬 노드에서 토픽 네임과 네임스페이스(
__ns)는 정상적으로 재지정이 된다. - 원래 노드 네임 재지정시 꼭 절대 경로로 해야하는건 아닌데 현재는 절대 경로로만 작동한다.
- 토픽 네임은 절대 경로로 하지 않아도 재지정 가능하다. (재지정시 앞에
/없어도 됨)
Roslaunch
ROS로 제대로된 시스템을 구축하기 위해서는 여러개의 노드를 동시에 실행해야 하는데 매번 실행 할때마다 다수의 rosrun을 실행하는 것은 매우 번거롭다. 그래서 XML 형식으로 실행할 노드들을 적은 후 “*.launch” 확장자로 저장하여 roslaunch 명령어로 실행하면 다수의 노드를 한번에 실행할 수 있다. roslaunch 명령어 형식은 다음과 같다.
roslaunch <package_name> <launch_file> <arg_name>:=<arg_value>
1. launchers 패키지 생성
앞서 실행했던 두 쌍의 turtlesim_node와 turtle_teleop_key를 roslaunch를 이용해 실행하는 실습을 해본다. 먼저 launch 파일을 포함할 패키지를 생성한다.
$ cd ~/catkin_ws/src
$ catkin create pkg launchers
$ cd launchers
$ mkdir launch
$ gedit launch/double_turtle.launch
turtlesim.launch 파일을 다음과 같이 작성한다.
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_box"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop_box"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_musk"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop_musk"/>
</launch>
빌드 후 launch 파일을 실행해본다.
$ cd ~/catkin_ws
$ catkin build
$ source devel/setup.bash
$ roslaunch launchers double_turtle.launch
# 새 탭
$ rqt_graph
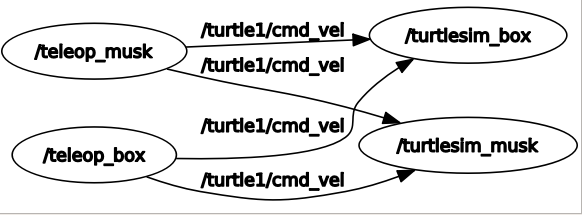
두 개의 turtlesim_node가 실행되서 두 개의 창이 뜨고 turtle_teleop_key도 두 개 실행되었는데 하나의 터미널에서 실행되서 잘 구분이 되진 않지만 그래프를 통해 노드를 확인할 수 있다.
2. launch tags
launch 파일을 이루는 여러 태그에 대해 알아보자.
<launch>
launch 파일은 기본적으로 <launch> 태그로 시작하고 끝나야 한다.
<launch>
...
</launch>
<launch> 태그 안에는 다양한 기능을 넣을 수 있다.
<node>
노드를 실행하는 태그인데 다양한 속성을 넣을 수 있다.
<node pkg="..." type="..." name="..." ns="..." args="..." />
- pkg: 패키지 이름 (필수)
- type: 노드 실행 파일 이름 (필수)
- name: 노드 네임 지정 (필수)
- ns: 네임스페이스 지정
- args: 노드 입력 파라미터
<remap>
노드나 토픽의 네임을 바꿀 수 있는 태그다. from 속성의 이름을 to 속성 값으로 바꾼다.
<remap from="src_name" to="dst_name"/>
<param>
ROS 마스터에 파라미터를 등록할 수 있는 태그다.
<param name="..." type="..." value="..." />
- name: 파라미터 이름
- value: 파라미터 값
- type: 파라미터 데이터 타입 (optional),
str, int, double, bool, yaml중 하나 선택, 명시적으로 지정하지 않으면 자동으로 타입이 지정됨
<group>
여러 노드에 대해 한번에 네임스페이스를 지정할 수 있는 태그다. ns 속성으로 그룹 안의 네임스페이스를 지정한다.
<group ns="name_space">
<node pkg="..." type="..." name="..." args="..." />
...
</group>
<args>
args는 launch 파일 내부에서 쓸 수 있는 인자를 만든다. 값은 바로 지정할 수도 있고 커맨드라인에서 지정할 수도 있다.
<!값을 지정하지 않고 선언만, roslaunch 실행시 반드시 값을 입력해야 함>
<args name="foo"/>
<!기본 값을 지정하여 커맨드라인에서 입력하지 않으면 기본 값이 들어감>
<args name="bar" default="default_value"/>
<!값을 정해서 바꿀 수 없음>
<args name="baz" value="fixed_value"/>
<!arg 값을 ROS 파라미터 값으로 사용>
<param name="goo" value="$(arg bar)"/>
<!arg 값은 다른 태그 어디서나 활용 가능>
<node pkg="..." type="..." name="..." args="$(arg baz)" />
- name: 인자의 이름
- default: 인자의 기본 값, 커맨드라인에서 바꿀 수 있다.
- value: 인자의 값, 커맨드라인에서 바꿀 수 없다.
3. Upgrade launch file
다양한 태그와 속성을 이용해서 위에서 만들었던 launch 파일을 다음과 같이 수정하여 launchers/launch/turtlesim_upgraded.launch로 저장한다.
<launch>
<group ns="box">
<remap from="/box/turtle1/cmd_vel" to="turtle_vel"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop_key"/>
</group>
<group ns="musk">
<remap from="/musk/turtle1/cmd_vel" to="turtle_vel"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop_key"/>
</group>
<arg name="turtle_size" default="300"/>
<param name="turtle_length" value="$(arg turtle_size)"/>
</launch>
커맨드라인에서 실행하고 파라미터와 그래프를 확인해본다.
$ roslaunch launchers turtle_upgraded.launch turtle_size:=200
# 새 탭
$ rosparam get /turtle_length
200
$ rqt_graph
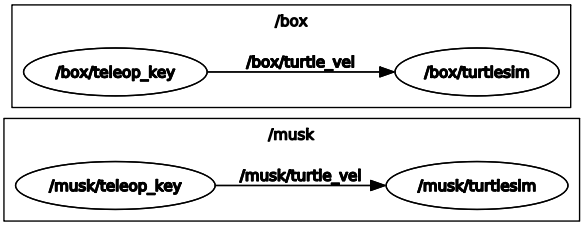
launch 파일에서 한 일은 다음과 같다.
group태그를 이용해 “box”와 “musk” 두 개의 네임스페이스로 네임들을 나누었다.remap태그를 이용해 토픽 네임을 “turtle1/cmd_vel”에서 “turtle_vel”로 바꿨다.remap은node보다 앞에 와야 작동하며 네임스페이스 내부 경로로는 작동하지 않는다.node태그를 이용해서 노드를 두 개씩 똑같이 실행했지만 네임스페이스가 달라서 겹치지 않았다.arg태그를 이용해 “turtle_size”라는 인자를 만들었다.param태그를 이용해 “turtle_length”라는 ROS 파라미터를 만들었다.