Create ROS Package
Create ROS Package in Python
ROS 기반의 로봇 프로그래밍의 핵심은 노드들 사이의 통신을 활용하는 것이다. 통신 방법에는 토픽, 서비스, 액션 세 가지 방법이 있는데 여기서는 토픽과 서비스의 기본적인 사용방법과 새로운 메시지 타입을 만들어 통신하는 방법을 알아볼 것이다. ROS 메시지들은 int32, float32, string 등과 같은 기본 타입들의 조합으로 구성되며 기본 타입으로 만들어진 메시지를 묶어서 고수준의 메시지를 만들수도 있다. 기본 메시지 타입은 이곳(http://wiki.ros.org/msg)에서 확인할 수 있다.
토픽 메시지는 패키지의 msg 디렉토리 아래 .msg 파일 형식으로 저장되어야 하고 서비스 메시지는 srv 디렉토리 아래 .srv 파일 형식으로 저장되어야 한다. 메시지 타입 빌드에 관한 공식 튜토리얼은 이곳(http://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv)에 있다.
Simple Topic Comm.
Create Package
가장 단순한 형태의 토픽을 사용하는 예제를 통해 토픽 사용법을 알아볼 것이다. 예제에서는 std_msgs 패키지의 Int32라는 단순한 정수형 데이터를 보내는 연습을 해본다. 먼저 커맨드에서 topic_simple이라는 패키지를 만든다.
$ cd ~/catkin_ws/src
~/catkin_ws/src$ catkin create pkg topic_simple --catkin-deps rospy std_msgs
catkin create pkg는 패키지 디렉토리를 만들고자 하는 위치에서 실행해야 한다.
ROS와 무관한 패키지를 개발할 게 아니라면 --catkin-deps 옵션은 필수다. 사용하는 언어별 기본 패키지를 추가해야 한다. C++을 쓰면 roscpp를 넣어야 하고 파이썬을 쓰면 rospy를 넣어야 한다. std_msgs는 기본 메시지 타입을 쓰기 위해 필요한 패키지므로 거의 항상 들어간다.
다음으로 script 디렉토리에 퍼블리셔와 서브스크라이버 노드 역할을 할 두 개의 파이썬 스크립트를 만든다. 꼭 script라는 디렉토리가 아니라 프로젝트 루트나 다른 디렉토리 명에 저장해도 상관없다. 그리고 실행 권한을 줘야 하는데 rosrun으로 노드 실행시 python script.py처럼 파이썬 인터프리터를 통해서 실행하는 게 아니라 ./script.py와 같이 스크립트 자체를 실행하는 것이므로 실행 권한을 부여해야한다.
~/catkin_ws/src/topic_simple$ cd topic_simple
~/catkin_ws/src/topic_simple$ mkdir script
~/catkin_ws/src/topic_simple/scripts$ cd script
~/catkin_ws/src/topic_simple/scripts$ touch topic_publisher.py topic_subscriber.py
~/catkin_ws/src/topic_simple/scripts$ chmod a+x topic_publisher.py topic_subscriber.py
Scripts
package.xml
패키지 정보는 자동 생성된 틀을 거의 그대로 쓰면 된다. 아래의 내용을 자신에 맞게 수정해보자.
<?xml version="1.0"?>
<package format="2">
<name>topic_simple</name>
<version>0.1.0</version>
<description>The topic_simple package</description>
<maintainer email="email@email.com">ian</maintainer>
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
</package>
CMakeLists.txt
cmake는 원래 C/C++ 소스를 빌드하기 위해 있는 것이지만 ROS에서는 패키지를 관리하는 기능도 하기 때문에 아래 네 줄은 반드시 필요하다. find_package()를 통해 이 패키지가 의존하는 다른 패키지를 지정할 수 있고 catkin_package()를 실행해야 이후 rosrun으로 이 패키지의 실행 파일을 노드로서 실행할 수 있다.
cmake_minimum_required(VERSION 2.8.3)
project(topic_simple)
find_package(catkin REQUIRED COMPONENTS
rospy
std_msgs
)
catkin_package(
CATKIN_DEPENDS rospy std_msgs
)
topic_publisher.py
다음은 토픽을 발행하는 노드를 구현한 파이썬 스크립트다.
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
rospy.init_node('topic_publisher')
pub = rospy.Publisher('counter', Int32, queue_size=1)
rate = rospy.Rate(2)
count = 0
while not rospy.is_shutdown():
pub.publish(count)
print "publish: %d" % count
count += 1
rate.sleep()
한 줄 씩 의미를 살펴보자.
#!/usr/bin/env python
스크립트의 맨 위에 있는 #!으로 시작하는 라인을 shebang이라고 한다. 이 스크립트를 어떤 인터프리터로 실행할 것인지를 명시적으로 지정한다. 보통 쉘 스크립트에서 #!/usr/bin/bash와 같이 명시적으로 인터프리터의 절대 경로를 지정한다. /usr/bin/env python은 시스템의 기본 파이썬을 쓰겠다는 것이다. 시스템 기본 파이썬은 보통 /usr/bin/python인데 시스템에 따라 위치가 다를 수 있으니 env 명령어와 같이 쓰면 which python으로 찾을 수 있는 시스템의 기본 파이썬 인터프리터를 실행해준다.
import rospy
from std_msgs.msg import Int32
rospy는 파이썬에서 ROS 기능을 쓸 수 있게 해주는 다양한 함수와 클래스를 담고 있는 패키지다. std_msgs는 기본 메시지 타입을 가지고 있는 패키지인데 그 중에서 Int32라는 데이터 타입만 import 하였다.
rospy.init_node('topic_publisher')
pub = rospy.Publisher('counter', Int32, queue_size=1)
rospy.init_node()는 이 실행 파일을 ROS의 노드로 만들어준다. 여기에 들어가는 인자는 노드의 기본 네임(Name)이다. 실행할 때 네임을 바꾸지 않으면 이 “topic_publisher”라는 이름으로 노드가 생성된다.
rospy.Publisher()는 퍼블리셔 객체를 만들어준다. 입력인자로 발행할 토픽의 네임(counter), 메시지 타입(Int32), queue_size(1)가 들어간다. queue_size는 ROS가 데이터를 보내는 속도보다 코드에서 퍼블리시를 실행하는 속도가 빨라서 전송되지 못한 메시지가 쌓일 경우 최대 몇 개까지 쌓아둘지를 결정한다.
rate = rospy.Rate(2)
count = 0
while not rospy.is_shutdown():
pub.publish(count)
print "publish: %d" % count
count += 1
rate.sleep()
이후 while문을 통해 주기적으로 데이터를 발행한다. 발행 주기를 조절하기 위해 rospy.Rate(2)으로 주기 객체를 생성하고 (초당 2회) while문 안에서 rate.sleep()을 통해 주기에 해당하는 시간만큼 정지하여 속도를 조절한다.
위에서 만든 퍼블리셔 객체 pub에서 publish() 함수를 실행하여 데이터를 전송한다. 이때 입력인자의 데이터 타입이 퍼블리셔를 만들때 지정한 데이터 타입(Int32)과 일치해야한다.
topic_subscriber.py
다음은 토픽을 구독하는 노드를 구현한 스크립트다.
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
def callback(msg):
print "subscribe: %d" % msg.data
rospy.init_node('topic_subscriber')
sub = rospy.Subscriber('counter', Int32, callback)
rospy.spin()
한 줄씩 의미를 알아보자. 위 세 줄은 topic_publisher.py와 같다.
퍼블리셔와 마찬가지로 서브스크라이버 노드도 rospy.init_node()를 통해 프로세스를 ROS 노드로 등록해야한다. rospy.Subscriber()로 서브스크라이버 객체(sub)를 만드는데 인자로 구독할 토픽의 네임(‘counter’), 토픽의 메시지 타입(Int32), 메시지가 왔을 때 이를 처리할 콜백 함수(callback)를 지정한다. 콜백 함수는 메시지가 도착할 때마다 실행된다. ros.spin()는 콜백 함수를 기다리는 동안 프로세스가 종료되지 않도록 잡아두는 역할을 한다.
Build and Run
코드와 패키지 설정 파일을 작성했다면 이제 패키지를 빌드하고 실행해봐야 한다. 워크스페이스 디렉토리에서 catkin build 명령어를 통해 패키지 전체를 일괄 빌드할 수 있다. 새로운 패키지를 실행 후에는 ~/catkin/devel/setup.bash를 실행해야 rosrun에서 해당 패키지를 찾을 수 있다. 이미 ~/.bashrc에 실행 명령을 추가했기 때문에 새로운 터미널을 열어도 같은 효과를 낼 수 있다.
$ cd ~/catkin_ws
~/catkin_ws$ catkin build
~/catkin_ws$ source devel/setup.bash
아래 네 줄의 명령어를 각기 다른 탭에서 실행하여 스크립트가 정상작동하는지 확인해보자.
$ roscore
# 새 탭
$ rosrun topic_simple topic_publisher.py
# 새 탭
$ rosrun topic_simple topic_subscriber.py
# 새 탭
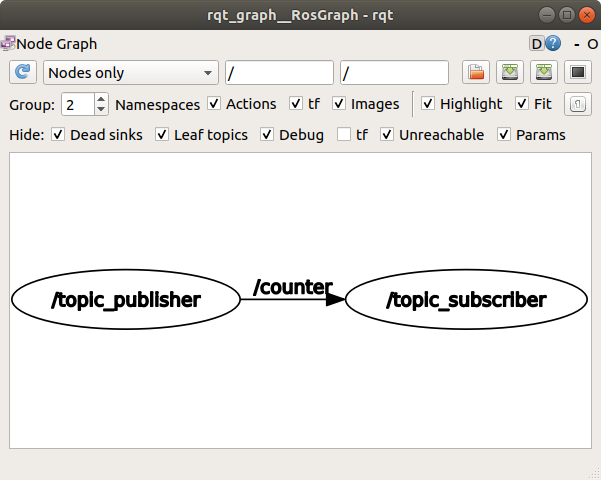
$ rqt_graph
rqt_graph를 통해 현재 실행되고 있는 노드의 네임과 그 사이를 연결하는 토픽의 네임을 확인할 수 있다.
Custom Topic Comm.
Create Package
이번에는 직접 정의한 메시지 타입을 만들어서 사용해보도록 하자. 새로운 패키지 topic_custom는 로봇의 포즈(Pose)를 시간과 함께 메시지를 발행할 것이며 이를위해 다음 요소들을 만들것이다.
- TimePose.msg: 사용자 정의 메시지 타입
- custom_publisher.py: “TimePose” 타입의 데이터를 발행하는 노드
- custom_subscriber.py: “TimePose” 타입의 데이터를 구독하는 노드
geometry_msgs 패키지에 포함된 메시지 타입을 이용해 사용자 정의 메시지 타입을 만들 것이다. 패키지를 생성할 때 geometry_msgs와 메시지 생성을 위한 message_generation을 --catkin-deps에 추가해야한다.
$ cd ~/catkin_ws/src
~/catkin_ws/src$ catkin create pkg topic_custom --catkin-deps rospy std_msgs geometry_msgs message_generation
이번에는 노드 파일 뿐만 아니라 TimePose.msg라는 메시지 파일도 msg라는 디렉토리 아래 만들어준다.
~/catkin_ws/src$ cd topic_custom
~/catkin_ws/src/topic_custom$ mkdir script msg
~/catkin_ws/src/topic_custom$ touch msg/TimePose.msg
~/catkin_ws/src/topic_custom$ cd script
~/catkin_ws/src/topic_custom/script$ touch custom_publisher.py custom_subscriber.py
~/catkin_ws/src/topic_custom/script$ chmod a+x custom_publisher.py custom_subscriber.py
Scripts
package.xml
패키지 생성을 통해 자동으로 만들어진 package.xml에서 주석을 지우고 패키지 정보를 수정한 것이다. 자동생성된 파일에는 마지막의 <exec_depend>message_runtime</exec_depend>이 없으니 추가해야한다.
<?xml version="1.0"?>
<package format="2">
<name>topic_custom</name>
<version>0.1.0</version>
<description>The topic_custom package</description>
<maintainer email="ian@mail.com">ian</maintainer>
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>geometry_msgs</build_depend>
<build_depend>message_generation</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>geometry_msgs</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>geometry_msgs</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>message_runtime</exec_depend>
</package>
CMakeLists.txt
topic_simple 패키지에 비해 추가된 것은 add_message_files()와 generate_messages()이다. 각각 메시지 파일을 빌드 타겟에 추가하고 의존 메시지를 지정하는 함수다. 유의할 점은 자동생성된 파일에는 CATKIN_DEPENDS 옆에 message_generation이 있는데 이를 지워야 에러가 나지 않는다. catkin_package() 함수는 다른 패키지가 빌드된 topic_custom 패키지를 사용할 때 필요한 의존 패키지인데 빌드가 되고나면 message_generation이 필요없게 된다.
cmake_minimum_required(VERSION 2.8.3)
project(topic_custom)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
message_generation
rospy
std_msgs
)
# Generate messages in the 'msg' folder
add_message_files(
FILES
TimePose.msg
)
# Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
geometry_msgs
std_msgs
)
catkin_package(
CATKIN_DEPENDS geometry_msgs rospy std_msgs
)
TimePose.msg
메시지 타입을 정의하는 파일이다. msg 디렉토리에 있어야 한다. 여기서는 기본 타입인 time과 기본 타입으로 만들어진 메시지 타입 geometry_msgs/Pose2D을 조합한 TimePose라는 메시지 타입을 만들었다.
time timestamp
geometry_msgs/Pose2D pose
geometry_msgs/Pose2D라는 메시지 타입을 확인해보자. x, y, theta로 좌표와 방향으로 로봇의 2차원 포즈(Pose, 자세)를 나타낸다.
$ rosmsg info geometry_msgs/Pose2D
float64 x
float64 y
float64 theta
패키지를 완성하고 나서 catkin build를 실행하면 /home/ian/catkin_ws/devel/lib/python2.7/dist-packages/topic_custom/msg/TimePose.py 라는 파일이 생긴다. msg 형식으로 만든 메시지 타입으로부터 파이썬 클래스를 자동 생성하여 파이썬 코드에서 사용할 수 있게 해준다.
custom_publisher.py
TimePose 타입의 데이터를 발행하는 노드를 다음과 같이 구현하였다.
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Pose2D
from topic_custom.msg import TimePose
rospy.init_node('custom_publisher')
pub = rospy.Publisher('custom_msg', TimePose, queue_size=1)
msg = TimePose()
rate = rospy.Rate(1)
while not rospy.is_shutdown():
msg.timestamp = rospy.get_rostime()
second = msg.timestamp.secs
msg.pose = Pose2D(x=second%4, y=second%7, theta=second%5)
pub.publish(msg)
print "publish:", msg.timestamp.secs%100, msg.pose.x, msg.pose.y, msg.pose.theta
rate.sleep()
전체적인 구조는 topic_publisher.py와 유사하다.
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Pose2D
from topic_custom.msg import TimePose
topic_custom 패키지는 catkin build를 실행해야 만들어지지만 일단 먼저 사용한다. topic_custom으로부터 발행할 메시지 타입인 TimePose라는 클래스 타입을 가져왔다. TimePose를 만들기 위해 내부인자의 타입인 Pose2D도 가져온다.
rospy.init_node('custom_publisher')
pub = rospy.Publisher('custom_msg', TimePose, queue_size=1)
“custom_publisher”라는 노드를 만들고 “custom_msg”라는 토픽으로 TimePose 타입의 데이터를 발행하는 객체를 생성한다.
msg = TimePose()
rate = rospy.Rate(1)
while not rospy.is_shutdown():
msg.timestamp = rospy.get_rostime()
second = msg.timestamp.secs
msg.pose = Pose2D(x=second%4, y=second%7, theta=second%5)
pub.publish(msg)
print "publish:", msg.timestamp.secs%100, msg.pose.x, msg.pose.y, msg.pose.theta
rate.sleep()
메시지를 발행하는 라인들만 보면 간단하다. TimePose 타입의 객체를 만들고 (msg = TimePose()) 객체의 두 가지 데이터(timestamp, pose)를 채운 뒤 메시지를 발행하였다. (pub.publish(msg))
custom_subscriber.py
TimePose 타입의 데이터를 구독하는 노드를 다음과 같이 구현하였다.
#!/usr/bin/env python
import rospy
from topic_custom.msg import TimePose
def callback(msg):
print "subscribe:", msg.timestamp.secs%100, msg.pose.x, msg.pose.y, msg.pose.theta
rospy.init_node('custom_subscriber')
sub = rospy.Subscriber('custom_msg', TimePose, callback)
rospy.spin()
메시지 타입만 변했을 뿐 topic_subscriber.py와 매우 유사하다. 퍼블리셔와 서브스크라이버 사이에 맞춰야 하는 것은 TimePose라는 메시지 타입과 “custom_msg”라는 토픽 네임이다.
Build and Run
이제 패키지를 빌드하고 실행할 수 있다. catkin build를 통해 빌드 후 ~/catkin/devel/setup.bash를 실행해야 한다.
$ cd ~/catkin_ws
~/catkin_ws$ catkin build
~/catkin_ws$ source devel/setup.bash
아래 네 줄의 명령어를 각기 다른 탭에서 실행하여 스크립트가 정상작동하는지 확인해보자.
$ roscore
# 새 탭
$ rosrun topic_custom custom_publisher.py
# 새 탭
$ rosrun topic_custom custom_subscriber.py
# 새 탭
$ rqt_graph
rqt_graph를 통해 현재 실행되고 있는 노드의 네임과 그 사이를 연결하는 토픽의 네임을 확인할 수 있다.
Note: 반드시 퍼블리셔 노드, 서브스크라이버 노드, 메시지 파일이 하나의 패키지 안에 있어야 서로 통신할 수 있는 것은 아니다. 각각 다른 패키지에 있어도 의존성만 잘 명시해준다면 상관없다.
다음은 custom_publisher.py를 실행한 결과다.
$ rosrun topic_custom custom_publisher.py
publish: 57 1 3 2
publish: 58 2 4 3
publish: 59 3 5 4
publish: 60 0 6 0
publish: 61 1 0 1
publish: 62 2 1 2
publish: 63 3 2 3
publish: 64 0 3 4
publish: 65 1 4 0
...
다음은 custom_subscriber.py를 실행한 결과다. Pose2D의 데이터 타입이 float64라서 소수점이 표시된다.
$ rosrun topic_custom custom_subscriber.py
subscribe: 59 3.0 5.0 4.0
subscribe: 60 0.0 6.0 0.0
subscribe: 61 1.0 0.0 1.0
subscribe: 62 2.0 1.0 2.0
subscribe: 63 3.0 2.0 3.0
subscribe: 64 0.0 3.0 4.0
subscribe: 65 1.0 4.0 0.0
...
Custom Service Comm.
Create Package
토픽을 써봤다면 서비스도 다뤄봐야한다. 서비스의 일회성 통신을 이용하여 간단한 더하기 연산을 해주는 서버를 구현할 것이다. 먼저 service_custom 패키지와 내부 파일들을 만들어보자. 서비스는 메시지에 비해서 다양하지 않으므로 보통 타입을 직접 만들어서 쓴다. --catkin-deps에는 기본 타입인 Int32를 쓰기 위해 std_msgs를 추가하고 새로운 서비스 타입을 만들기 위해 message_generation도 추가한다.
$ cd ~/catkin_ws/src
~/catkin_ws/src$ catkin create pkg service_custom --catkin-deps rospy std_msgs message_generation
~/catkin_ws/srcl$ cd service_custom/
~/catkin_ws/src/service_custom$ mkdir srv script
~/catkin_ws/src/service_custom$ touch srv/AddTwoNum.srv
~/catkin_ws/src/service_custom$ cd script
~/catkin_ws/src/service_custom/script$ touch service_server.py service_client.py
~/catkin_ws/src/service_custom/script$ chmod a+x service_server.py service_client.py
Scripts
package.xml
topic_custom과 마찬가지로 기본 생성된 package.xml에 패키지 정보를 수정하고 <exec_depend>message_runtime</exec_depend>를 추가하였다.
<?xml version="1.0"?>
<package format="2">
<name>service_custom</name>
<version>0.1.0</version>
<description>The service_custom package</description>
<maintainer email="ian@email.com">ian</maintainer>
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>message_generation</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>message_runtime</exec_depend>
</package>
CMakeLists.txt
새로운 서비스 메시지 타입을 만들기 위해 add_service_files()로 서비스 정의 파일을 지정하였다. CATKIN_DEPENDS 옆에 붙어있던 message_generation은 삭제한다.
cmake_minimum_required(VERSION 2.8.3)
project(service_custom)
find_package(catkin REQUIRED COMPONENTS
message_generation
rospy
std_msgs
)
# Generate services in the 'srv' folder
add_service_files(
FILES
AddTwoNum.srv
)
# Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
CATKIN_DEPENDS rospy std_msgs
)
AddTwoNum.srv
서비스 메시지 타입을 지정한다. 서비스는 클라이언트에서 데이터를 먼저 보내면서 처리를 요청하는 Request 타입과 서버에서 처리되 결과를 회신하는 Response 타입이 있다. --- 위에 있는 부분이 Request 타입이고 아래 부분이 Response 타입이다.
int32 a
int32 b
---
int32 sum
패키지 완성 후 catkin build를 하면 ~/catkin_ws/devel/lib/python2.7/dist-packages/<package_name>/srv에 서비스 메시지 타입을 클래스로 정의하는 파이썬 스크립트가 자동생성된다. 여기에는 세 가지 클래스가 정의되어있다.
<service_name>Request: 클라이언트에서 보내는 요청 타입을 정의한 클래스<service_name>Response: 서버에서 보내는 응답 타입을 정의한 클래스<service_name>: 요청 클래스와 응답 클래스를 멤버 변수로 가진 클래스
이 패키지 같은 경우 ~/catkin_ws/devel/lib/python2.7/dist-packages/service_custom/srv/_AddTwoNum.py 파일이 생기고 이 파일에는 AddTwoNumRequest, AddTwoNumResponse, AddTwoNum까지 총 세 개의 클래스가 정의되어 있다.
service_server.py
다음은 서비스 서버를 구현한것이다. 서버는 데이터를 받는 입장이기 때문에 코드가 topic_subscriber.py와 유사하다.
#!/usr/bin/env python
import rospy
from service_custom.srv import AddTwoNum, AddTwoNumResponse
def service_callback(request):
response = AddTwoNumResponse(sum=request.a + request.b)
print "request data:", request.a, request.b, ", response:", response.sum
return response
rospy.init_node('service_server')
service = rospy.Service('add_two_number', AddTwoNum, service_callback)
rospy.spin()
부분별로 나눠서 살펴보자.
#!/usr/bin/env python
import rospy
from service_custom.srv import AddTwoNum, AddTwoNumResponse
이후 사용을 위해 서비스 타입인 AddTwoNum과 서비스 응답 타입인 AddTwoNumResponse를 가져왔다.
rospy.init_node('service_server')
service = rospy.Service('add_two_number', AddTwoNum, service_callback)
rospy.spin()
서버 노드를 초기화하고 rospy.Service() 객체를 생성하여 노드가 처리할 서비스를 등록한다. 서비스 네임은 “add_two_number”이고 서비스 타입은 AddTwoNum이다. 서비스 요청시 service_callback라는 함수에서 이를 처리하여 응답을 준다. 프로그램이 종료하지 않도록 rospy.spin()를 추가하였다.
service_client.py
서비스 클라이언트는 토픽 퍼블리셔처럼 정기적으로 무한히 계속 보내지 않고 특정 조건이 맞을 때만 일회성으로 요청을 보낸다.
#!/usr/bin/env python
import rospy
from service_custom.srv import AddTwoNum, AddTwoNumRequest
rospy.init_node('service_client')
rospy.wait_for_service('add_two_number')
requester = rospy.ServiceProxy('add_two_number', AddTwoNum)
print "requester type:", type(requester), ", callable?", callable(requester)
rate = rospy.Rate(10)
count = 0
while count < 100:
if count % 10 == 0:
req = AddTwoNumRequest(a=count, b=count/2)
res = requester(req)
print count, "request:", req.a, req.b, "response:", res.sum
rate.sleep()
count += 1
부분별로 나눠서 살펴보자.
#!/usr/bin/env python
import rospy
from service_custom.srv import AddTwoNum, AddTwoNumRequest
이후 사용을 위해 서비스 타입인 AddTwoNum과 서비스 요청 타입인 AddTwoNumRequest를 가져왔다.
rospy.init_node('service_client')
rospy.wait_for_service('add_two_number')
requester = rospy.ServiceProxy('add_two_number', AddTwoNum)
클라이언트 노드를 초기화하고 “add_two_number”라는 서비스를 처리하는 서버가 나타날때까지 기다린다. 서버가 생기기 전에 다음 줄을 실행하면 예외가 발생한다. rospy.ServiceProxy()는 서버에 요청을 보내는 callable class 객체를 생성해준다. 서버와 클라이언트의 서비스 네임과 서비스 타입을 동일하게 맞춰야한다.
while count < 100:
if count % 10 == 0:
req = AddTwoNumRequest(a=count, b=count/2)
res = requester(req)
count가 100 이하인 동안 10의 배수가 될때마다 “add_two_number” 서비스 요청을 보낸다. 요청 타입인 AddTwoNumRequest 객체를 만들어 a, b 두 요청 값을 입력하고 requester를 통해 요청을 보낸다. 서버의 응답은 requester의 리턴 값으로 바로 받을 수 있다.
즉, 서버에 요청을 보내고 이를 처리해서 응답을 받을 때까지 res = requester(req) 이 라인에 묶여있다는 뜻이다. 그래서 서버의 콜백 함수는 가급적 처리시간이 짧게 구현하는 것이 좋다. 처리시간이 긴 요청은 액션을 통해 처리하는 것이 낫다.
Build and Run
이제 패키지를 빌드하고 실행할 수 있다. catkin build를 통해 빌드 후 ~/catkin/devel/setup.bash를 실행해야 한다.
$ cd ~/catkin_ws
~/catkin_ws$ catkin build
~/catkin_ws$ source devel/setup.bash
아래 명령어를 각기 다른 탭에서 실행하여 스크립트가 정상작동하는지 확인해보자.
$ roscore
# 새 탭
$ rosrun service_custom service_server.py
# 새 탭
$ rosrun service_custom service_client.py
다음은 service_server.py를 실행한 결과다.
$ rosrun service_custom service_server.py
request data: 0 0 , response: 0
request data: 10 5 , response: 15
request data: 20 10 , response: 30
request data: 30 15 , response: 45
request data: 40 20 , response: 60
request data: 50 25 , response: 75
request data: 60 30 , response: 90
request data: 70 35 , response: 105
request data: 80 40 , response: 120
request data: 90 45 , response: 135
다음은 custom_subscriber.py를 실행한 결과다. 서버와 같은 값을 출력하는 것을 볼 수 있다.
$ rosrun service_custom service_client.py
requester type: <class 'rospy.impl.tcpros_service.ServiceProxy'> , callable? True
0 request: 0 0 response: 0
10 request: 10 5 response: 15
20 request: 20 10 response: 30
30 request: 30 15 response: 45
40 request: 40 20 response: 60
50 request: 50 25 response: 75
60 request: 60 30 response: 90
70 request: 70 35 response: 105
80 request: 80 40 response: 120
90 request: 90 45 response: 135